Page Not Found
Page not found. Your pixels are in another canvas.
A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Navigating dynamic environments requires the robot to generate collision-free trajectories and actively avoid moving obstacles. Most previous works designed path planning algorithms based on one single map representation. Although they have shown success in static environments, due to the limitation of map representation, those methods cannot reliably handle static and dynamic obstacles simultaneously. To address the problem, We proposes a gradient-based B-spline trajectory optimization algorithm utilizing the robot’s onboard vision.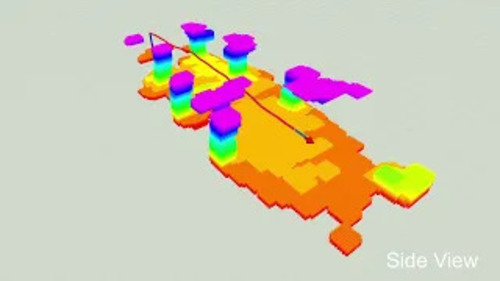
A real-time dynamic obstacle tracking and mapping system for UAV navigation and collision avoidance 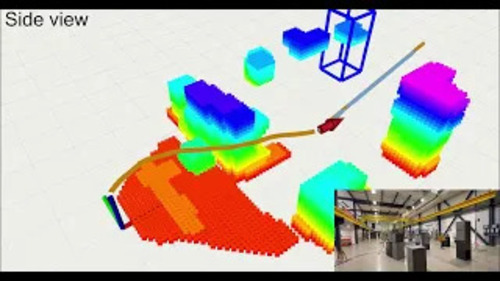
We Developed methods for stabilizing large scale power systems based on Input-to-State Stability (ISS) Lyapunov-based neural certificate, by treating a large system as an interconnection of smaller subsystems. Each ISS Lyapunov function of subsystem could be collected to prove the global stability of power system. 
We Developed deep reinforcement learning (DRL) based social navigation approach for multiple intelligent robots to safely move in pedestrian-rich environments via cooperative perception. 
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Published in RA-L, 2023
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). https://arxiv.org/abs/2303.00132
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.