Vision-aided Path planning
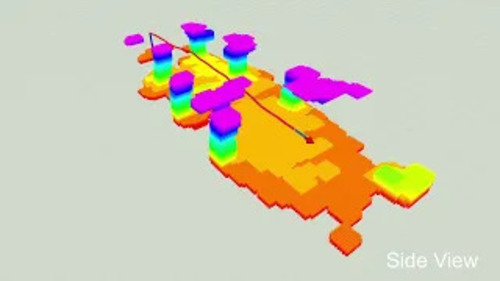
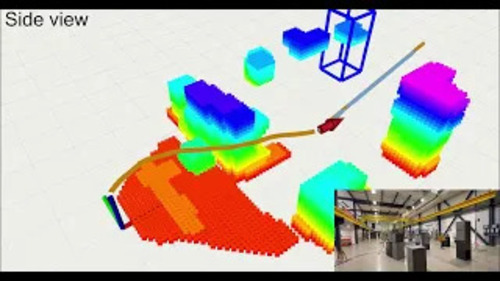
Navigating dynamic environments requires the robot to generate collision-free trajectories and actively avoid moving obstacles. Most previous works designed path planning algorithms based on one single map representation. Although they have shown success in static environments, due to the limitation of map representation, those methods cannot reliably handle static and dynamic obstacles simultaneously. To address the problem, We proposes a gradient-based B-spline trajectory optimization algorithm utilizing the robot’s onboard vision.