|
Yumeng Xiu Hi, I am a Research Assistant at the Department of Mechanical Engineering at CMU, advised by Prof. Kenji Shimada. I also completed my master’s degree in MechE at CMU. I am broadly interested in robotics, learning to control and optimization, my research goal is to develop real autonomous intelligent robots. |
|
ResearchPreviously in my Master study, my researches focus on safe exploration and navigation for robot autonomy: including developing an accurate perception system and safe trajectory planning/prediction algorithms for aerial vehicles navigation in complex environments. I’ve also worked on Learning-based control, combinig control theory and machine learning for networked power system control. My ultimate goal is to develop rigorous algorithms to enable safe and autonomous actions in the field of robotics and apply them on real-world applications. |
|
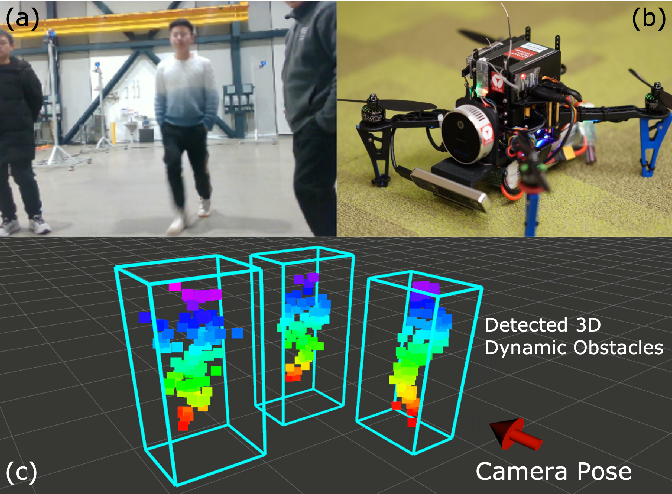
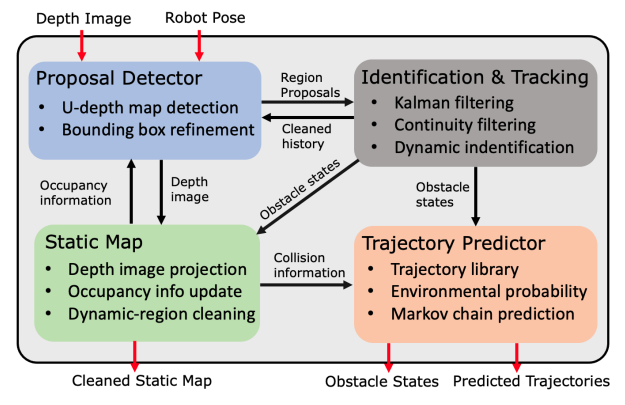
Low computational-cost detection and tracking of dynamic obstacles for
mobile robots with RGB-D cameras
Zhefan Xu, Xiaoyang Zhan, Yumeng Xiu, Christopher Suzuki, Kenji Shimada, IEEE Robotics and Automation Letters, 2024 project page / arXiv We propose a lightweight 3D dynamic obstacle detection and tracking (DODT) method based on an RGB-D camera, which is designed for low-power robots with limited computing power. |
|
A vision-based autonomous UAV inspection framework for unknown tunnel
construction sites with dynamic obstacles
Zhefan Xu, Baihan Chen, Xiaoyang Zhan, Yumeng Xiu, Christopher Suzuki, Kenji Shimada, IEEE Robotics and Automation Letters, 2023 project page / arXiv Tunnel construction using the drill-and-blast method requires the 3D measurement of the excavation front to evaluate underbreak locations. To maximally increase the level of autonomy, our approach proposes a vision-based UAV inspection framework for dynamic tunnel environments without using a prior map, utilizing a hierarchical planning scheme, decomposing the inspection problem into different levels. |
|
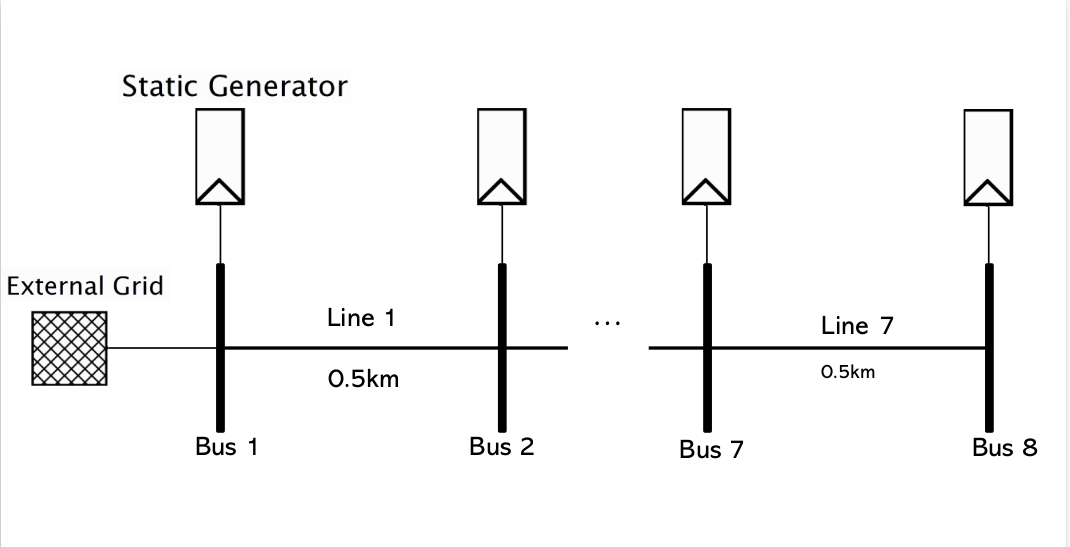
Compositional Neural Certificates for Networked Dynamical Systems
Songyuan Zhang, Yumeng Xiu, Guannan Qu, Chuchu Fan, L4DC, 2023 (Oral Presentation) project page / arXiv Developing stable controllers for large-scale networked dynamical systems is crucial but has long been challenging due to two key obstacles: certifiability and scalability. In this paper, we present a general framework to solve these challenges using compositional neural certificates based on ISS (Input-to-State Stability) Lyapunov functions. |
|
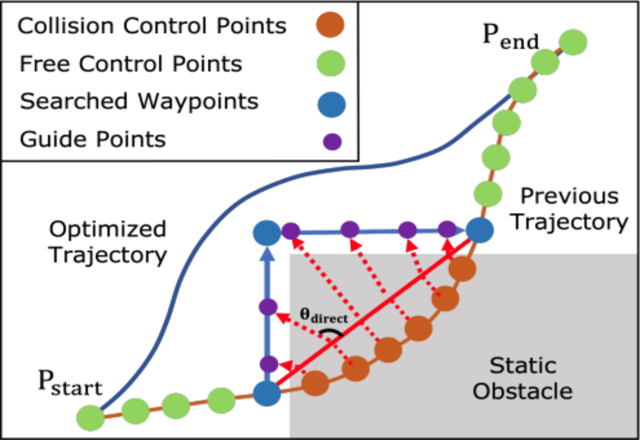
Vision-aided UAV navigation and dynamic obstacle avoidance using
gradient-based B-spline trajectory optimization
Zhefan Xu, Yumeng Xiu, Xiaoyang Zhan, Baihan Chen, Kenji Shimada, ICRA, 2023 project page / arXiv Navigating dynamic environments requires the robot to generate collision-free trajectories and actively avoid moving obstacles. However, existing methods cannot reliably handle static and dynamic obstacles simultaneously. To address the problem, this paper proposes a gradient-based B-spline trajectory optimization algorithm utilizing the robot's onboard vision. |
|
A real-time dynamic obstacle tracking and mapping system for UAV
navigation and collision avoidance with an RGB-D camera
Zhefan Xu, Xiaoyang Zhan, Baihan Chen, Yumeng Xiu, Kenji Shimada, ICRA, 2023 project page / arXiv A real-time dynamic obstacle tracking and mapping system for quadcopter obstacle avoidance using an RGB-D camera. |
Projects
|
|
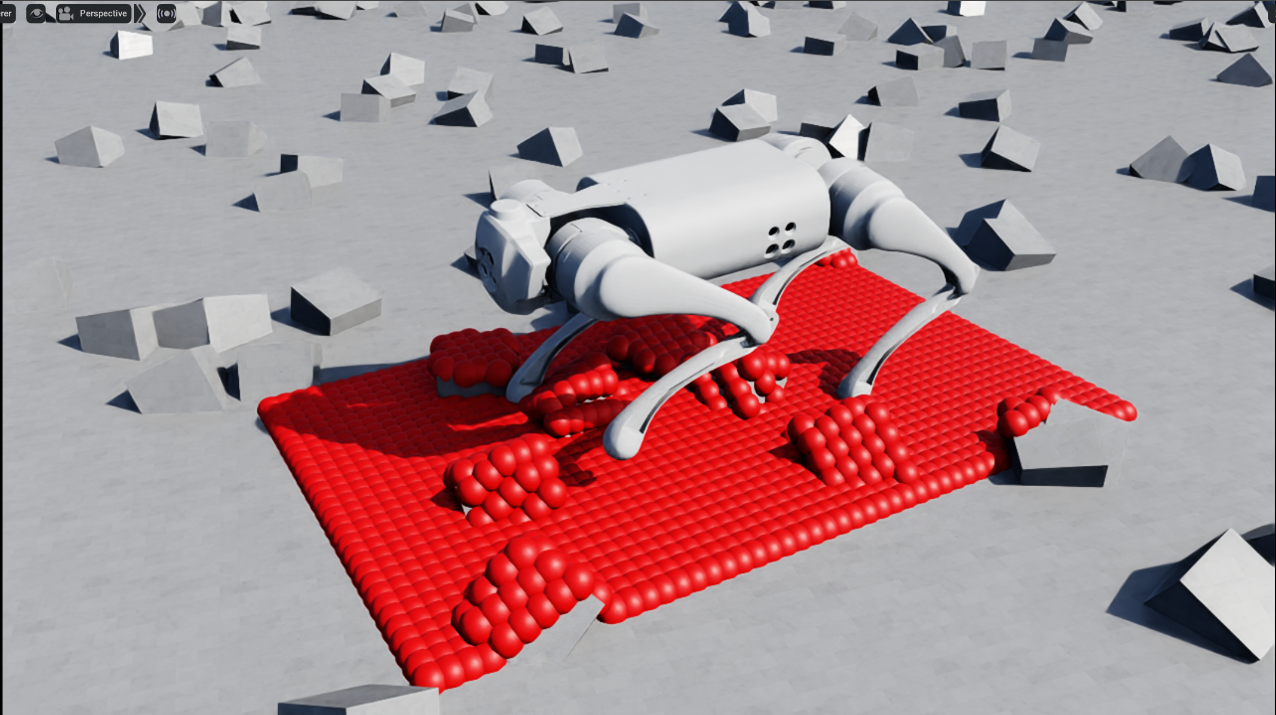
VLM-Guided Traversability Reasoning for Quadrupedal Robots
Talking to Robots (11-851), Spring 2025 We utilize VLM to interpret visual data and language prompts, enabling quadrupedal robots to analyze traversability and navigate safely through complex environments. Techniques: VLM, Computer Vision |
Academic Service
• Journal Reviewer: TIE, TITS |
MiscI enjoy music, photography and philosophy. I am also very interested in hiking, cooking and fitness. |